近日😍,恒达平台邱禧荷副教授指導2022屆碩士研究生王浩宇(第一作者)在國際頂級國際會議IEEE世界機器人與自動化大會(IEEE InternationalConference on Robotics and Automation🥸,簡稱IEEE ICRA)發表研究成果,題目為“Subequivariant Reinforcement Learning Framework for CoordinatedMotion Control”📦。IEEE ICRA是機器人領域規模和影響力均排名第一的頂級國際會議,是機器人領域權威研究人員介紹其研究成果的首要國際論壇🙅🏼🥜,是機器人領域最頂級的國際會議之一😪。該論文第一單位為恒达娱乐,合作單位為無限光年(上海)技術有限公司。
該研究成果開創性研究框架突破機器人關節協調控製瓶頸。在機器人技術的發展過程中🔸,實現精準高效的協調關節運動控製一直是一個世界性挑戰。多關節機器人系統涉及眾多自由度,關節之間存在著錯綜復雜的相互作用和耦合關系💹⛳️,給運動控製帶來了巨大困難。傳統的強化學習算法和圖神經網絡方法往往難以準確捕捉這些內在依賴🏹,導致協調性能不佳。為了突破這一瓶頸,團隊經過大量深入研究🥬,提出了一種新穎的"CoordiGraph"框架。通過貫徹物理規律,將等變性和次等變性(Subequivariant)原理融入強化學習的關節運動控製流程🎎,從根本上增強了對關節間耦合特征的建模能力👨🏻🔬。該項創新性研究工作有力突破了傳統方法的瓶頸,為解決機器人協調運動控製難題貢獻了全新的思路。
2023年,邱禧荷副教授及其指導的2021屆碩士研究生史少傑在國際頂級會議🌳🧀、中國計算機學會推薦A類會議國際計算機視覺大會(International Conference on Computer Vision,簡稱ICCV)上,首次以我校作為第一作者和第一完成單位發表了論文。該會議吸引一萬余篇投稿,接收率僅為20%。這篇論文的發表不僅是電子電氣工程恒达的一次重要突破,也是我校在人工智能領域頂級國際會議上發表研究成果的突破👩🏼✈️。
本次研究成果是我校首次在機器人、控製頂級會議首次以第一作者第一單位發表文章🚵🏼。ICRA作為機器人領域的頂級會議,本次成果獲錄用充分展示了我校在人工智能和計算機視覺領域👩👦、控製領域的研究實力🏇🏻👨🦼➡️,為我校在全球科研舞臺上的影響力進一步加分。
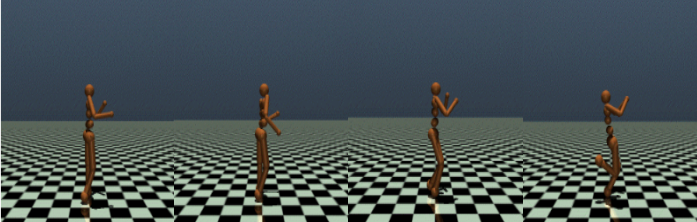
圖.在MuJoCo環境中訓練一個類人智能體(預印版見http://arxiv.org/abs/2403.15100)
