融合計算與位置服務科研團隊
一、團隊/研究所簡介
融合計算與位置服務科研團隊由教授🔀、青年博士10余人組成🌰,團隊負責人為吳飛教授。團隊與國防科技大學✍🏽、上海交通大學★、北京大學🗄、南開大學等有著長期合作關系🕵🏿,且開展多項科研合作研究和成果推廣工作。近年來,團隊成員先後獲得國家863項目重大專項、國家自然科學基金、上海市科委重點項目、上海市張江重大專項🏄🏼♀️、上海市教委重點項目等眾多項目的資助🧙🏿♂️,致力於綠色計算、無人駕駛、無線感知、智慧社區、物聯網等領域的研究。
二👨🏻🌾、團隊負責人
吳飛🧚🏿,教授🧑🏼🌾,1998年國防科技大學計算機博士學位畢業🉐,國防科大自動化控製博士後✭、南開大學(廣發證券)金融數學博士後🧞♀️。在軍隊期間先後主持國家863軟件重大專項“支持銀稅類控製設備智能化升級的嵌入式軟件平臺”,借調地方政府協助陳火旺院士規劃、設計和實施國家發改委軟件園重點項目——“國家863孵化器(長沙基地)項目建設和服務支撐系統”👨🏻💻,以及參與眾多國防科研類項目等𓀖。2007年轉業上海工作後,現為恒达娱乐計算機方向教授🙋🏼,計算機學會系統結構專委委員,ACM會員等。其承擔國家科技部/工信部重點領域專家,國家自然基金評審專家、上海市科委信息化領域專家等。到目前為止,已經發表核心刊物論文近百篇,授權國家發明專利10多項,完成指導碩士、博士研究生累計近百人等。
近五年來,吳飛教授主要開展兩大領域的研究工作:其一是綠色計算及物聯網智慧系統👨🏻🌾,包括國基金面上項目“多核實時約束下基於DVFS/DPM節能技術的任務調度研究”,以及上海市張江重大產業集群培育項目“面向智慧電視的節能調度支撐系統 ”等。其二是無人機駕駛與位置服務領域🤵🏻♀️,包括上海市科委重點科技項目“基於多源無縫定位導航的橋梁無人機巡檢技術及應用示範”、“地鐵車站行人自主定位與引導服務支撐平臺及關鍵技術”等。
三、團隊主要成員
1. 孫憲坤,副教授👨🏼⚕️,碩士生導師😷🐿。上海大學計算機應用專業在讀博士研究生。華東師範大學地理信息科學國家教育部重點實驗室高級研究訪問學者☂️❇️。近十年來在GNSS導航🛍️、計算機視覺、智能感知與控製等領域進行技術研究👴、產品開發、項目管理工作。承擔省部級科研和企業橫向課題開發10余項🚚,近五年發表SCI論文5篇🧃,其中以通訊或第一作者發表SCI收錄論文2篇🧟,EI收錄論文1篇。2008年獲恒达娱乐“計算機硬件類課程的教學改革實踐” 二等獎(4/5),2004年獲恒达娱乐“矽奇獎教金”三等獎,2002年獲國家統計局信息中心、國家統計學會優秀軟件三等獎(2/5)。
2. 張玉金,男,博士🧚🏽♀️,副教授,碩士生導師,IEEE/中國計算機學會/中國圖象圖形學學會會員,中國圖象圖形學學會數字媒體取證與安全專委會委員✉️、多媒體專委會委員,畢業於上海交通大學電子工程系,現於恒达娱乐電子信息系從事教學和科研工作。在教學方面💅⤴️,主講數字視頻/圖像處理、數字內容安全、可編程器件應用、路由與交換🙋🏿♀️、C語言程序設計、科學計算與圖形繪製等專業課程,主持教育部產學合作協同育人項目1項、上海市重點課程建設項目1項以及校級課程建設項目2項。在科研方面,曾參與和主持了國家863計劃項目、國家自然科學基金面上項目𓀝、上海市科委重點項目、上海市自然科學基金面上項目、上海市重點實驗室項目、上海市教委青年教師培養資助計劃項目等科研項目的研究工作🎷,在相關領域國內外學術期刊及國際學術會議上發表學術論文60余篇,其中,SCI/EI收錄30余篇🪸,申請了國家發明專利12項和實用新型專利7項💯。擔任IEEE Transactions on Information Forensics and Security⏮、IEEE Signal Processing Letters等相關領域國內外學術期刊審稿專家,ICCT2018~2020🧙🏻♀️、ICASSP2021、ICCEAI2021、NCIG2020、IWDW2019等相關領域國內外學術會議的TPC member、審稿專家。在學生培養方面🍬,指導學生參加 “挑戰杯”全國大學生課外學術科技作品競賽🧕🏽、全國大學生電子設計競賽、全國大學生數學建模競賽、中國研究生數學建模競賽、中國研究生電子設計競賽、上海市研究生智慧城市創意設計大賽㊗️、美國大學生數學建模競賽等相關學科競賽獲國家獎和上海市獎多項。曾獲得全國大學生電子設計競賽上海賽區優秀指導老師🔑、校青年五四獎章等榮譽。
3. 朱海,講師,碩士生導師。南京郵電大學博士♟。主要研究領域包括🤶🏽:無線感知網絡、移動計算等👩🏻🔬。近五年發表論文8篇🤘🏽🧤,其中SCI檢索期刊論文3篇,EI會議檢索論文4篇。目前主持上海市青年科技英才揚帆計劃1項🔫👨🏼🦳,國家自然科學基金青年基金1項🌖。
4. 尹玲,講師,碩士生導師🍼👮♀️。華東師範大學與法國國家信息與自動化研究所聯合培養博士。主要研究方向包括🚕:模型驅動式軟件開發與形式化方法、基於深度神經網絡的時間序列的分析和預測🫰🏽。主持國家自然科學基金青年基金1項👨🏻🦯➡️,作為主要成員參加了國家自然科學基金面上項目、上海市科委上海市重點項目等多項基金。負責或作為主要參與人承擔了汽配天線智能檢測多項軟件開發項目。在國內外高水平期刊和會議上發表論文10余篇🤶🏽。近幾年的主要研究興趣包括:
“異構時間與異構行為融合的需求建模和需求確認方法研究”🙆🏼♂️,研究物聯網環境下融合行為的建模、分析和實現🈵;
“上海地區地殼位移形變場觀測”🫢,研究基於深度學習和GPS時間序列數據的地殼形變分析🤦🏻♂️、高樓危險性評估和預測等;
“中低速微小無人機空地協同調度平臺”👱🏻♂️1️⃣,研究面向任務的基於目標任務的無人機空地協同平臺,多維約束下的路徑規劃和邊緣計算的調度問題👳♂️。
5.王澤傑🪻,講師🧑🏻🍳。浙江大學碩士𓀁。主要研究領域包括圖像處理、機器學習等。目前的研究興趣包括🖖:基於慣性傳感器件的行人定位和導航、多傳感器融合定位算法等。完成上海市教委“優青”項目1項。
四🧔🏼♀️、主要論文及專利成果
1、D.Zhang, D. Guo, F. Wu, etc. TL-Plane-Based Multi-Core Energy-Effificient Real-Time Scheduling Algorithm for Sporadic Tasks. ACM Transactions on Architecture and Code Optimization, Vol. 8, No. 4, Article 47, Publication date: January 2013.
2🧑🏿🦳💆♀️、C. Wang📙😰,F. Wu,etc🧗🏻,Indoor positioning technique by combining RFID and particle swarm optimization-based back propagation neural network. Optik,2016.09.01,6839~6849◼️,SCI。
3、 H. Zhu, F. Xiao, L. Sun, R. Wang and P. Yang, “R-TTWD: Robust Device-Free Through-The-Wall Detection of Moving Human With WiFi,” IEEE Journal on Selected Areas in Communications (2017.5).
4🪡、Wanqing Song, Ming Li, Yuanyuan Li, Carlo Cattani,Chi-Hung Chi,Fractional Brownian motion: differences of iterative forecasting models, Chaos Solitons & Fractals, 2019.
5、Yangde Gao, SongWanqing, Spare optimistic based on improved ADMM and the minimum entropy deconvolution for the early weak fault diagnosis of bearings in marine systems, ISA Transactions, 2018.
6、張冬松,王玨,趙誌峰🖱,吳飛🧜🏿♀️🥊,PLUFS:一種開銷敏感的周期任務在線多處理器節能實時調度算法👨🏼⚖️🤹🏼♀️,計算機研究與發展👱🏿♀️🧏🏼♀️,2016.7.15,(07):1454~1466❤️,
7、授權專利,ZN201510582166.3,“一種基於可調功率AP的室內定位方法”🤘🏻。董波🕑,吳飛,邢健,鄒燕,江鳳,王昌誌。
8、授權專利,CN201410336372.1🧙🏼,“一種監控視頻壓縮方法”。陳運文,吳飛,陳益平等🤦🏽。
9、授權專利,CN201410363938.x🔝,“基於雲中心的推送視頻碼流終端設備節能方法及系統”🤦🏼♂️,吳飛、陳運文、胡浩民等🕵🏼♀️。
10、受理專利🚶♂️,201711021438.8,“一種基於電磁指紋信息的低空無人飛行器定位導航方法”。吳飛♛,鐘亞洲,陳珊珊等👨🏼💻。
五、主要項目成果
團隊註重與各行業企業開展產學研合作,圍繞在智慧家居、綠色計算、定位導航、無人駕駛等關鍵共性技術和前沿技術的成果🦍,通過“技術+平臺+內容+服務”的合作模式,廣泛服務社會與產業需求🧖🏻♀️,多項成果已得到成功應用𓀅。主要成果如下🦅:
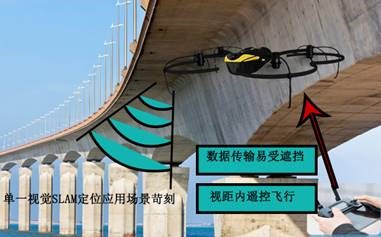
1. 基於多源融合的橋梁無人機巡檢技術及示範應用
通過與中科院系統、北鬥定位上市公司的深度合作👨🏻🦯➡️,針對橋梁無人機巡檢需求,團隊領頭研發了基於GNSS、SOP與視覺SLAM等的多源信息融合的♟,適用低速無人機平臺的橋梁自主巡檢應用平臺🪺。該平臺極大地推進了多源定位導航技術在橋梁🧑🏿🚀、高架巡檢等交通與市政工程中的應用,極大地提高橋梁巡檢效率和安全性,為智能化、數據化的橋梁養護提供支持。目前該平臺正在推進產業落地和工程實踐🦻🏼,良好地滿足了橋梁🥔、高架巡檢等交通與市政工程的日常巡檢中。
六🪢、團隊活動
1. 推進項目合作
2015年10月,國防科技大學一級教授金士堯將軍介紹國家“北鬥”、“超級計算”等國家重大項目的研製和應用情況,並與恒达平台吳飛教授等商討雙方在北鬥位置服務、大數據處理等科研方向的各種合作形式,尤其探討落實雙方在推進項目研究的合作措施🤳🏻。

2. 上海青浦區在線訪談節目邀請吳飛教授做專題節目
上海青浦區在線訪談節目邀請我校學術委員會委員🤟🏻、恒达平台吳飛教授,圍繞“護航首屆進博會•人工智能與信息安全”這一主題與廣大網民進行交流與互動。吳老師向大家介紹了當前人工智能發展現狀🧑🏽🎓、人工智能時代對信息安全帶來的挑戰以及對人工智能未來發展展望等。

七、團隊學生培養
團隊註重學生培養🥍,已培養畢業60多名研究生。鼓勵學生參與團隊管理,做自己的主人💁🏻♂️,群策確立建立健全實驗室管理製度、團隊獎懲製度、團隊財務製度等,除了科研和項目實踐方面的活動🧗🏿,還定期組織學生們的戶外團隊建設例如羽毛球賽等,從多方面促進學生全方面素質的提升。經過團隊的培養和鍛煉👩🏻🦯,學生們在科研實踐項目、競賽等方面屢獲佳績🧛🏻♀️,獲得挑戰杯、研究生電子設計競賽、數學建模競賽一等獎🧶;在TCSVT🥰、NVAA等權威期刊發表論文,獲批多項專利和軟著🪐;畢業後大部分同學去業界發揮所學👦🏼,就職於上海申通、花旗銀行等公司擔任工程師職務🂠,有誌於深造的學生們則繼續到南航等高校繼續讀博🎸📓,或去浙江大學嘉興研究院等科研院所擔任算法工程師,繼續進行科研研究🗽。

